The apparent non‑gravitational acceleration the extra-solar-system ‘Oumuamua exhibits is puzzling. We find that when the position and velocity of the Sun is correctly set in computing the predicted orbit, ‘Oumuamua’s trajectory can be explained with gravity and we have reproduced the unexpected gap by computation. We also propose to search for new extra-solar-system high speed asteroids with SOHO to check our method with their trajectories.
1. ‘Oumuamua’s acceleration
‘Oumuamua, formally designated 1I/2017 U1, is an interstellar object passing through the Solar System which was first detected by Robert Weryk using the Pan-STARRS telescope on 19 October 2017 [1][2][3]. It seems to exhibit non‑gravitational acceleration, making it go further than expected [3][4][5][6][7][8].
In the article « Our Solar System’s First Known Interstellar Object Gets Unexpected Speed Boost » June 27, 2018 [9], it was reported that “’Oumuamua had been boosted by 25,000 miles (40,000 kilometers) compared to where it would have been if only gravitational forces were affecting its motion”, see Figure 1 and Figure 2 which are screenshots of the animation in this article and show the predicted orbit and the unexpected gap of 40 000 kilometers between the last observation of ‘Oumuamua and the predicted spot.
Although “the Canada-France-Hawaii Telescope (CFHT) and, in the following days, the ESO Very Large Telescope (VLT) and the Gemini South Telescope, both8-meter-class facilities, found no sign of coma despite optimal seeing conditions”, the authors still “find outgassing to be the most physically plausible explanation” [5].
However, because of the lack of coma we think that the boost of ‘Oumuamua can still be attributed to some overlooked effects. For example, what if the Sun is moving in the solar system? What if, due to the motion, the Sun is not exactly at the focus of the predicted hyperbolic orbit? In these cases, the real trajectory of ‘Oumuamua will not fit the predicted one.
We know that the Sun is not exactly at the barycenter of the solar system and moves relative to it, as shown by Figure 3 [11] in which the Sun is the central point and the barycenter wanders around it. But in reality the solar system is an isolated system the center of which is its barycenter. The frame of the barycenter is inertial, in this frame the barycenter is fixed and the Sun wanders around it. So, the Sun is always at a distance from the barycenter and moves at nonzero velocity.
Pursuing this direction we propose this hypothesis: the unexpected gap could be the consequence of erroneous position and velocity of the Sun with which the predicted orbit was computed.
For checking this hypothesis we will compute the trajectory of ‘Oumuamua by adjusting the position and velocity of the Sun such as to reproduce approximately the gap of 40 000 km.
2. Static and shifting orbits
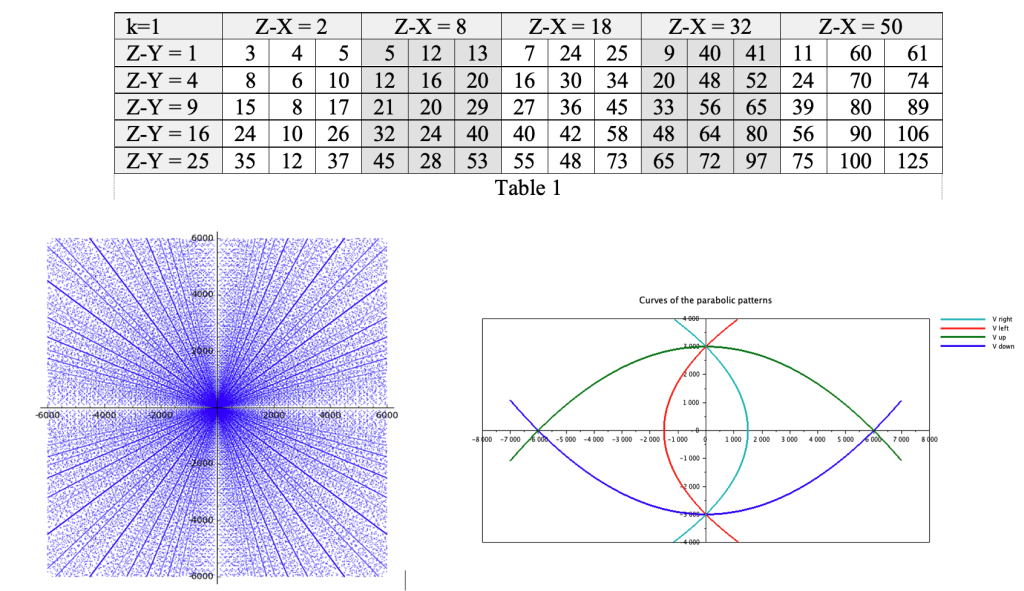
The basic parameters of the predicted orbit for ‘Oumuamua are published by JPL / NASA in the page ‘Oumuamua (A/2017 U1) [12]. The eccentricity e, the semi-major axis a, the orbital elements [15] and the standard gravitational parameter of the Sun GM☉ [13] are given in Table 1. The semi-latus rectum l and specific relative angular momentum h are computed in (2) and (3). The predicted orbit is a hyperbolic orbit which is expressed by equation (1) [14].
Just for the purpose of checking our hypothesis, we put the focus of the predicted orbit at the barycenter of the solar system. This orbit is static and we call it the static orbit. The orbit of ‘Oumuamua is a hyperbola the focus of which is the moving Sun. So this orbit shifts in the frame of the barycenter and is called shifting orbit.
…
3. Search for high speed asteroids near the Sun
Beside of computing the trajectory of ‘Oumuamua, a better way to check our hypothesis is by experiment, that is, by observing new high speed asteroids and compare their trajectory with prediction. However, recorded asteroids and comets coming into the solar system from the outside are scarce. But I think that in reality such objects are not so rare, only that far from the Sun they are too faint to be detected. When they are near the Sun they become very bright and can be detected by Sun gazing satellites such as SOHO (Solar and Heliospheric Observatory).
Many such alien asteroids and comets are already recorded by SOHO and are dormant in great number in the archives of SOHO. Thanks to NASA Goddard’s YouTube Movie “Decades of Sun from ESA & NASA’s SOHO” [19], which is a video made with all the photos taken by LASCO/C3 between 1998/01/06 and 2020/10/23, I have found several high speed asteroids and comets in it.
For example, the asteroid that was recorded from 2004/02/26 to 2004/02/28. I have computed its visual velocity which is the velocity of the dot on the image and got 160 km/s, see Figure 7. The comet recorded from 2015/02/18 to 2015/02/21 is measured at 182 km/s, see Figure 8. For comparison, the speed of ‘Oumuamua at perihelion is 87.71 km/s [8]. I used the diameter of the view field of LASCO/C3 which equals 30 radii of the Sun [20] and the time printed on the images to compute its visual velocity. As the actual trajectories make an angle with the plane of the image, their real velocity are forcefully bigger. Only objects coming from the outside of the solar system can be as speedy.
I have made a clip of the asteroid and put it here: Super-fast alien asteroid (160 km/s), taken by SOHO in 2004, https://youtu.be/GTGuEKndNIc
The alien asteroids and comets in the archives of SOHO are interesting. We can count their number, mapping their direction and measure their record breaking speed and size. On the other hand, we can monitor in real time the appearance of new alien asteroids and comets, work out their orbits for observing them later.
In searching asteroids in the Movie “Decades of Sun from ESA & NASA’s SOHO” [19], the background stars and the streaks left by space particles are very dizzying which makes the researcher miss interesting asteroids and comets. So, I suggest that the background stars and streaks be removed for this research.
For those who are interested in seeing the asteroids and comets that I have found I have put in the appendices the links that point to the frames of the Movie “Decades of Sun from ESA & NASA’s SOHO” [19] where they appear. I have seen more comets because they are brighter and easy to see. I have also put the few visual velocities that I have computed, which show that some comets are very fast and could have come from the outside of the solar system.
4. Discussion
The analysis above shows that the unexpected gap can be well explained by the gravity of the Sun provided that the position and velocity of the Sun be correctly set in computing the predicted orbit. What matters is that the position and velocity of ‘Oumuamua be given with respect to the Sun’s actual position and velocity. If ‘Oumuamua were located with respect to the barycenter of the solar system while the Sun is not there, the predicted orbit would be wrong.
We have shown that because the combined trajectory is not a hyperbola and has moving focus the non‑gravitational acceleration may be unnecessary to explain that “the observed orbital arc cannot be fit in its entirety by a trajectory governed solely by gravitational forces due to the Sun, the eight planets, the Moon, Pluto, the 16 biggest bodies in the asteroid main belt, and relativistic effects” [5]. This is corroborated by the lack of coma.
We have also discovered that even the smallest error on the position and velocity of the Sun is enough to create an unexpected gap. Indeed, the distance used to reproduce the unexpected gap is only 12% of the radius of the Sun. So, the position and velocity of the Sun and the data of ‘Oumuamua must be precisely set.
On the other hand, our hypothesis must be checked again and again before being validated. Indeed, other value was given to this gap, for example, in the article « THIS INTERSTELLAR ASTEROID IS ACCELERATING » [18], 100 000 km has been given to the gap rather than 40 000 km. Obviously, there are several different predicted trajectories for ‘Oumuamua with different results. The correct theoretical trajectory for ‘Oumuamua must give Gap = 0 and our method can help for finding it.
We have proposed to check our hypothesis using the SOHO satellite in real time to find new alien asteroids and comets, work out their orbits for observing them later. It will be interesting to search for alien asteroids and comets in the archives of SOHO, which I have done partly.
For more detail of this study please read the complete paper here:
« Trajectory of ‘Oumuamua and wandering Sun, alien asteroids and comets detected by SOHO »
https://www.academia.edu/100818112/Trajectory_of_Oumuamua_and_wandering_Sun_alien_asteroids_and_comets_detected_by_SOHO